Chris Zhang

I am currently a 5th year PhD student in the Machine Learning Group at the University of Toronto, advised by Raquel Urtasun. Prior to this, I obtained my BASc in Systems Design Engineering at the University of Waterloo.
I am also currently a Research Scientist at the self-driving startup Waabi. Here I research learning-based driving policies, with applications in behavior simulation and autonomy.
My goal is to develop safe and intelligent agents for the real world. Key research questions I’m interested in are:
- What is the right data engine to enable scalable learning?
- What learning algorithms enable effective scaling with compute?
- How can we guarantee, test or validate the safety and performance agents we deploy?
publications
-
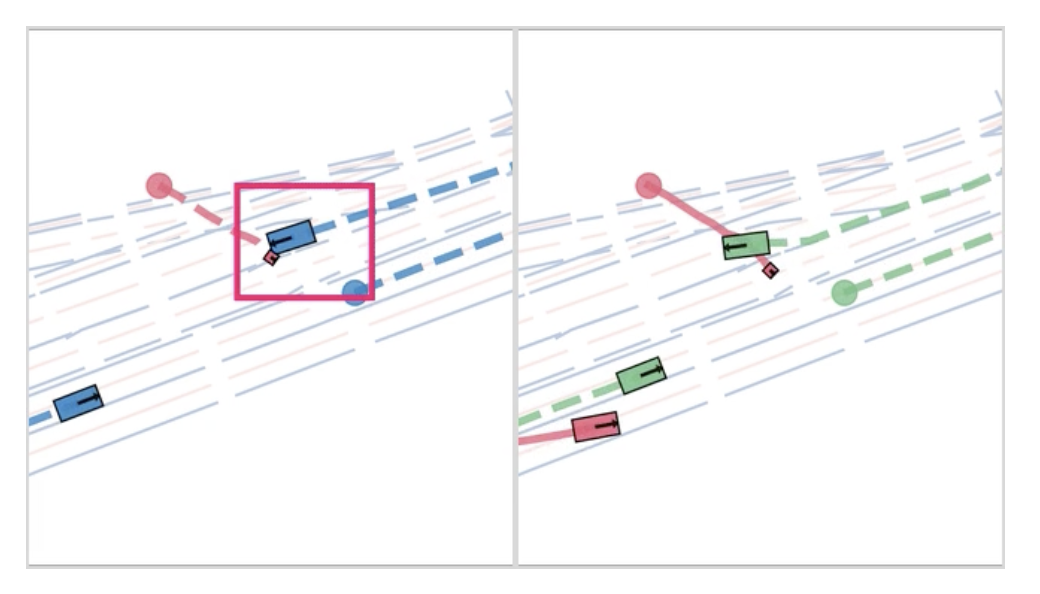 Learning to Drive via Asymmetric Self-PlayIn European Conference on Computer Vision (ECCV) , 2024
Learning to Drive via Asymmetric Self-PlayIn European Conference on Computer Vision (ECCV) , 2024Realistic, challenging and solvable scenarios naturally emerge from the interactions between a teacher and student policy with differing objectives. Use them to learn more robust driving policies.
-
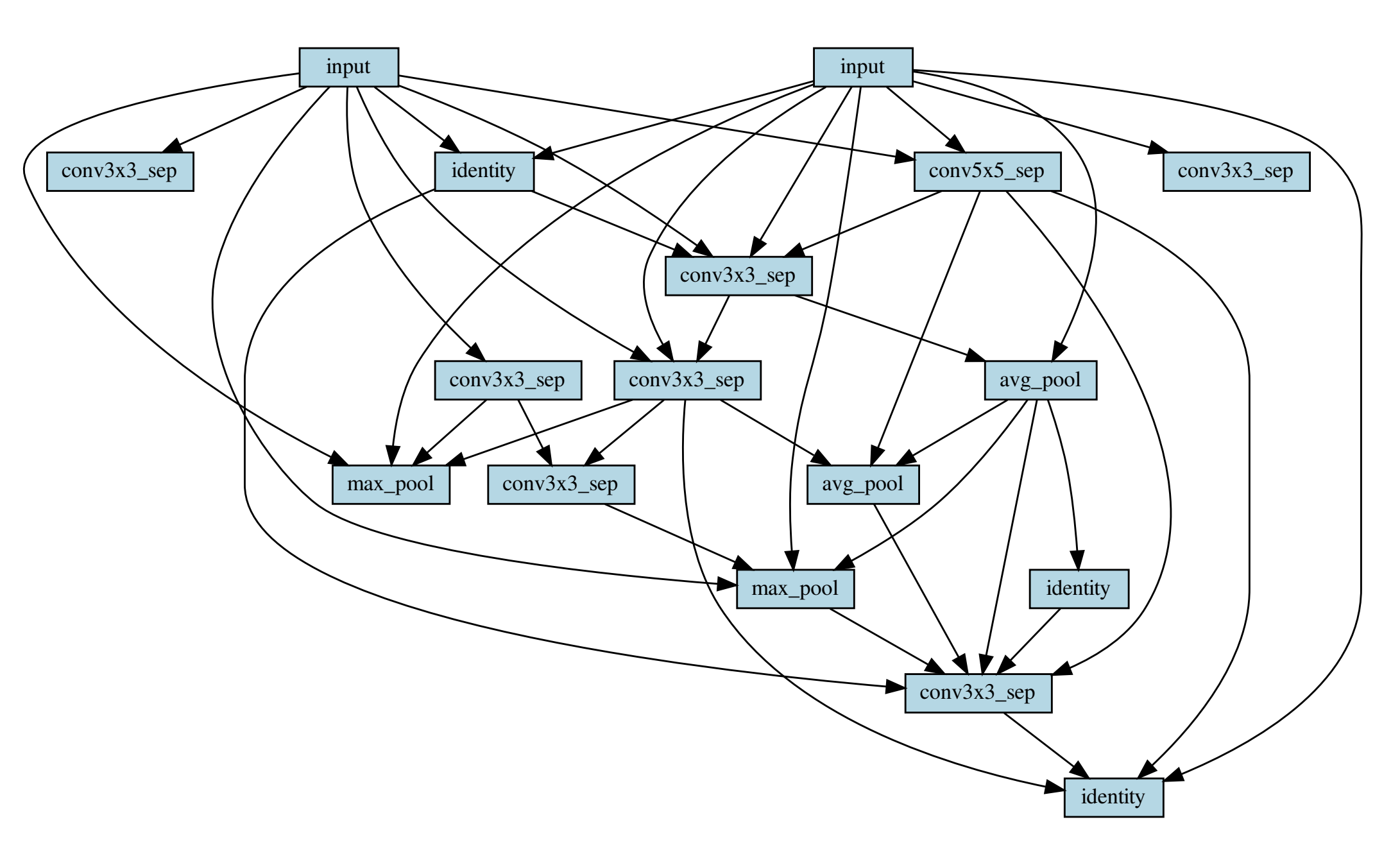 Graph HyperNetworks for Neural Architecture SearchIn International Conference on Learning Representations (ICLR) , 2019
Graph HyperNetworks for Neural Architecture SearchIn International Conference on Learning Representations (ICLR) , 2019Speed up architecture search by learning to predict the weights of a candidate architecture by message passing along its computation graph.
-
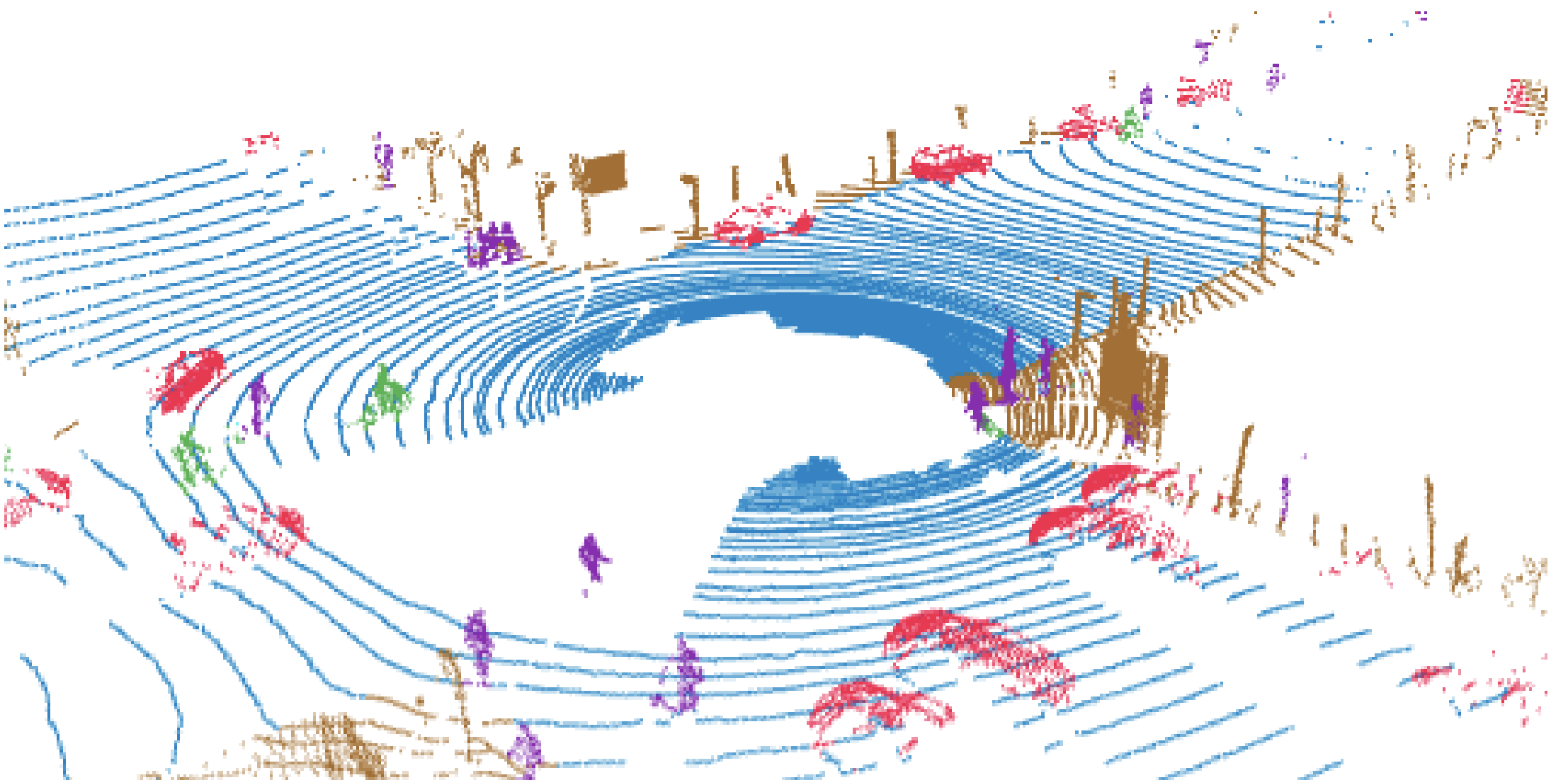 Efficient Convolutions for Real-time Semantic Segmentation of 3d Point CloudsIn 2018 International Conference on 3D Vision (3DV) , 2018
Efficient Convolutions for Real-time Semantic Segmentation of 3d Point CloudsIn 2018 International Conference on 3D Vision (3DV) , 2018Replace 3D convolutions with 2D convolutions in birds eye view for more efficient semantic segmentation.






